Updated 1 mayo 2025 by James Ocean
Detección de colisiones en Revit: cómo identificar y resolver colisiones en Revit
- Detección de colisiones en Revit
- ¿Cómo funciona la detección de colisiones en Autodesk Revit?
- Ventajas principales de Revit en la detección de colisiones
- Principales tipos de colisiones en el programa Autodesk Revit
- Limitaciones destacadas de las capacidades nativas de detección de conflictos de Revit
- Integración de Navisworks para la detección avanzada de conflictos
- Guía paso a paso: análisis de detección de colisiones en Revit
- Prácticas recomendadas para los procesos de detección de conflictos en Autodesk Revit
- Conclusión
Table of Contents
El complejo mundo del modelado de información de construcción implica muchos elementos importantes y partes móviles para que todo funcione según lo previsto. Este contexto complejo significa que la coordinación entre los diferentes sistemas de construcción es ahora más importante que nunca, lo que supone un reto significativo para los diferentes equipos de diseño.
Cabe mencionar aquí la detección de colisiones. Se trata de un proceso de identificación de conflictos espaciales entre los elementos de construcción en la fase de diseño, lo que lo convierte en una parte esencial de cualquier flujo de trabajo BIM moderno. La posición destacada de Autodesk Revit en el mercado le confiere potentes capacidades nativas de detección de colisiones, lo que supone un ahorro de miles de dólares en retrasos en los plazos y cambios sobre el terreno.
Sin embargo, la detección de colisiones entre tuberías y vigas no es la única capacidad de las herramientas de detección de colisiones de Revit: también representan un cambio fundamental en la forma en que los equipos de diseño pueden comunicarse y colaborar con otros participantes en el proyecto. Cuando se utilizan correctamente, estas herramientas pueden transformar el clásico proceso de revisión del diseño en un entorno proactivo de prevención de conflictos que no tiene que esperar a que surjan los problemas para empezar a resolverlos.
Nuestro objetivo en este artículo no es solo explorar el proceso de detección de colisiones de Revit, sino también intentar proporcionar contexto a estas funciones, incluyendo sus ventajas, sus inconvenientes y todas las diferentes formas en que pueden mejorar los resultados de los proyectos.
Detección de colisiones en Revit
La detección de colisiones en Revit es un proceso sistemático capaz de identificar conflictos espaciales entre elementos de construcción en el mismo modelo digital. La capacidad de visualizar y resolver conflictos y problemas en un entorno 3D hace que Revit sea muy superior a las capacidades tradicionales de dibujo en 2D, que solo podían abordar los problemas en la fase de construcción. Cuando componentes de diferentes disciplinas ocupan el mismo espacio, el programa puede detectarlo automáticamente y notificarlo al usuario para que tome las medidas de mitigación adecuadas.
El enfoque de Revit para la detección de colisiones se centra en su herramienta Interference Check, que está mucho más integrada en el entorno de modelado que cualquier programa independiente de detección de colisiones. Funciona desde la misma plataforma en la que los diseñadores crean y modifican sus modelos, lo que facilita enormemente la resolución de conflictos en tiempo real a medida que evoluciona el diseño.
Este enfoque integrado crea un flujo de trabajo más fluido entre la detección y la resolución, lo que permite tanto un análisis exhaustivo de todo el modelo como comprobaciones específicas entre sistemas concretos.
¿Cómo funciona la detección de colisiones en Autodesk Revit?
Las capacidades de detección de colisiones de Revit funcionan según el principio de la comparación geométrica entre archivos vinculados o categorías de modelos seleccionadas. Cuando se inicia el proceso, el programa realiza un análisis de los límites 3D de cada elemento seleccionado para identificar los casos en los que estos elementos podrían solaparse.
La naturaleza paramétrica de Revit también influye en este proceso, ya que cada elemento del modelo contiene una gran cantidad de información útil, además de su representación visual. De este modo, el sistema puede ayudar a Revit a distinguir entre conexiones o conflictos intencionados y no intencionados (por ejemplo, una tubería conectada a un accesorio podría marcarse como un conflicto, aunque técnicamente no suponga ningún problema).
El algoritmo subyacente de Revit lleva a cabo lo que es, en esencia, una operación de intersección booleana entre diferentes conjuntos de elementos. Los usuarios pueden incluso definir las categorías de elementos que deben compararse entre sí, como los sistemas de fontanería con las estructuras eléctricas, los componentes estructurales con los elementos mecánicos, etc.
Cuando la operación se completa, Revit genera un informe detallado de todos los conflictos encontrados, clasificándolos según su gravedad, los elementos involucrados y su ubicación. A cada conflicto se le asigna un identificador único, lo que permite un seguimiento y una resolución cómodos durante toda la fase de desarrollo del diseño.
Además de las sencillas funciones de detección, la comprobación de interferencias de Revit también está integrada con las funciones de gestión de cambios de la plataforma, lo que permite navegar directamente a las áreas problemáticas para que los diseñadores puedan resolver los problemas de forma más cómoda. Esto crea un flujo de trabajo cíclico, en el que la detección puede conducir a la resolución en el mismo entorno, sin necesidad de realizar procesos de exportación e importación que requieren mucho tiempo. El historial permanente de los problemas resueltos también ayuda a los diferentes equipos a documentar la evolución de los procesos de coordinación, al tiempo que verifica que los problemas anteriores siguen resueltos a medida que se desarrolla el modelo.
Ventajas principales de Revit en la detección de colisiones
La detección de colisiones de Revit ofrece ventajas sustanciales con respecto a los métodos de coordinación tradicionales, e incluso puede resultar beneficiosa en comparación con muchos programas independientes de detección de colisiones. Estas ventajas suelen ir más allá de la detección básica de errores, ya que aportan una mayor eficiencia del flujo de trabajo, una mejor calidad de la construcción y unos plazos de proyecto más optimizados. A continuación se enumeran muchas de estas ventajas.
Resolución de conflictos en tiempo real
La resolución de conflictos en tiempo real ayuda a los equipos de diseño a abordar los problemas a medida que surgen, en lugar de esperar a sesiones de coordinación específicas para hacerlo. El sistema de retroalimentación bidireccional facilita la aplicación retroactiva de cualquier cambio en todo el modelo. Por ejemplo, si el arquitecto ajusta la altura de un techo, los efectos de este cambio se propagan inmediatamente a otros sistemas, lo que permite detectar posibles problemas en un breve espacio de tiempo.
Reducción de los gastos generales de coordinación
La reducción de los gastos generales de coordinación es el resultado de mantener la función de detección de conflictos dentro del entorno de diseño principal. Los equipos de proyecto pueden evitar diversos procesos que requieren mucho tiempo, como exportar modelos, realizar comprobaciones externas, documentar problemas y, solo entonces, volver a Revit para realizar correcciones (manteniendo al mismo tiempo el control de versiones entre plataformas).
Mejor calidad del diseño
Las mejoras en la calidad del diseño aparecen de forma natural una vez que los diseñadores son conscientes de las diversas aplicaciones interdisciplinarias de un proceso de detección de colisiones de tan alto nivel. El ciclo de retroalimentación que crea este proceso puede fomentar un enfoque mucho más holístico de las diferentes decisiones de diseño. De este modo, los profesionales pueden estar mucho más inclinados a tener en cuenta las restricciones espaciales de otras disciplinas en sus diseños desde el principio.
Reducción de los costes de construcción
La disminución de los costes de construcción se deriva directamente de la posibilidad de identificar los conflictos antes de la fase de construcción in situ. La resolución de colisiones en la fase de diseño evita costosos cambios en los pedidos, así como retrasos en el calendario, desperdicio de material y todos los costes laborales adicionales asociados a los procesos de resolución de problemas in situ.
Mayor confianza del cliente
La confianza del cliente aumenta cuando los equipos pueden demostrar unos resultados de coordinación exhaustivos durante las revisiones del diseño. La capacidad de presentar un modelo sin colisiones es una prueba tangible de los procesos de control de calidad, lo que tiende a reducir las preocupaciones del cliente sobre diversas cuestiones de constructibilidad que pueden surgir más adelante.
Documentación optimizada
Por otro lado, la optimización de la documentación es el resultado de que los modelos sin colisiones permiten elaborar calendarios y planos más precisos. Cuando los sistemas de construcción se coordinan adecuadamente dentro del mismo modelo, la documentación de construcción resultante puede reflejar ese nivel de precisión, lo que reduce las solicitudes de aclaración y las solicitudes de información durante los procesos de construcción reales.
Principales tipos de colisiones en el programa Autodesk Revit
La implementación de una estrategia eficaz de detección de colisiones con una herramienta tan potente como Revit requiere un cierto nivel de conocimiento sobre las colisiones. Si bien es cierto que el programa en sí no etiqueta explícitamente el tipo de colisión en su interfaz, este conocimiento sigue siendo importante para desarrollar enfoques adecuados para la resolución y la priorización de los problemas.
Los conflictos duros son la categoría más sencilla. Se trata de intersecciones físicas entre dos objetos sólidos en el mismo espacio. Revit destaca en la identificación de estas infracciones con Interference Check, que las resalta mediante indicadores visuales claros. Los conflictos duros requieren una resolución inmediata en la mayoría de los casos, ya que representan imposibilidades físicas que impedirían por completo la finalización de los procesos de construcción.
Los conflictos blandos son infracciones de diversos requisitos de espacio libre o áreas de accesibilidad, no intersecciones físicas directas. Detectar conflictos blandos en Revit es mucho más difícil que los conflictos duros, ya que es necesario crear zonas de espacio libre como elementos separados del modelo (o utilizar objetos de habitación con parámetros específicos). Estos conflictos no son tan evidentes a simple vista como los duros, pero su potencial problemático es aproximadamente el mismo en lo que respecta a los procesos de construcción y mantenimiento.
Los conflictos de flujo de trabajo también se denominan a veces conflictos 4D. Están relacionados con conflictos temporales y la secuenciación de la construcción (radios de giro de grúas que se superponen a estructuras existentes, estructuras temporales que interfieren en los procesos de instalación, etc.). Estos problemas no se deben a intersecciones espaciales permanentes, sino al proceso de construcción. Para resolver estos conflictos, a menudo es necesaria una integración más profunda con programas de planificación de la construcción o herramientas BIM 4D especializadas, que van más allá de las capacidades nativas de Revit. Estos flujos de trabajo son uno de los principales casos de uso de la integración con Navisworks, otro programa de Autodesk que será importante más adelante.
Limitaciones destacadas de las capacidades nativas de detección de conflictos de Revit
Aunque Revit ofrece valiosas capacidades de detección de colisiones, también tiene una serie de limitaciones inherentes que los usuarios potenciales deben conocer. Estas limitaciones también llevan a complementar Revit con programas especializados para tareas más avanzadas o específicas. Los ejemplos más importantes de estas desventajas son:
- Capacidades de generación de informes limitadas, lo que puede restringir a los equipos a la hora de documentar y realizar un seguimiento de los conflictos a lo largo del tiempo. Revit solo ofrece una función básica de generación de informes de interferencias sin una categorización o filtrado sólidos, lo que tiende a dificultar la gestión sistemática de los conflictos en proyectos complejos en los que es habitual que se produzcan cientos de conflictos.
- Es de esperar un cierto grado de degradación del rendimiento en las tareas de detección de colisiones en modelos complejos y multifacéticos. Aunque Revit maneja bien la mayoría de los proyectos a gran escala, sus capacidades de procesamiento siguen siendo limitadas, incluso con el hardware más actualizado, lo que se traduce en tiempos de verificación más lentos e incluso en problemas ocasionales de estabilidad que pueden causar interrupciones en el flujo de trabajo o reducciones en la productividad del equipo.
- La insuficiencia de las capacidades de comprobación de espacios libres integradas en Revit puede dificultar la identificación y resolución de colisiones leves. Los equipos que necesitan estas capacidades deben buscar familias personalizadas o soluciones alternativas para detectar correctamente estos requisitos espaciales, ya que no existe soporte nativo para esta funcionalidad.
- Los retos de la coordinación interdisciplinar también surgen de los flujos de trabajo basados en archivos de Revit cuando es necesario mantener modelos separados en varias disciplinas. Es cierto que existe una función para comparar modelos vinculados entre sí, pero el proceso sigue siendo demasiado engorroso en comparación con las plataformas especializadas, lo que requiere una gestión cuidadosa de los archivos y, en ocasiones, incluso pasos adicionales para mantener la precisión de los resultados de los conflictos.
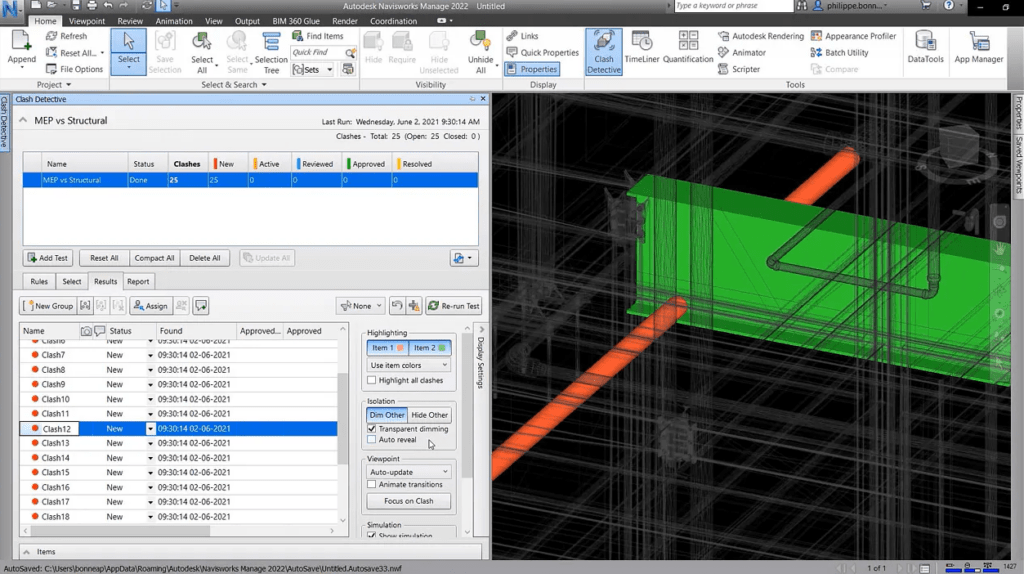
Cuando los proyectos requieren capacidades de coordinación más complejas que las que ofrece Revit, la solución obvia es buscar opciones de terceros. Navisworks suele considerarse la opción preferible, ya que también es un programa de Autodesk y está profundamente integrado con Revit desde el principio. Navisworks es una plataforma de coordinación diseñada específicamente que utiliza un proceso de exportación optimizado capaz de optimizar el tamaño de los archivos para mejorar el rendimiento y preservar la fidelidad del modelo al mismo tiempo.
Esta profunda integración permite crear un sistema complementario en el que el diseño se realiza en Revit, mientras que las funciones completas de detección de colisiones y seguimiento de la resolución se descargan a un entorno especializado de Navisworks. Este último opera a un nivel mucho más profundo, con la función Clash Detective para detectar colisiones. Esta función ofrece sólidas capacidades de generación de informes, mecanismos de filtrado complejos y un control granular de los parámetros de detección.
Los equipos pueden utilizar Navisworks para establecer reglas basadas en el espacio libre, implementar flujos de trabajo de resolución sistemáticos e incluso crear prioridades de colisión por niveles cuando es necesario. También es mucho más potente a la hora de manejar modelos grandes y complejos, algo con lo que las capacidades de detección de colisiones de Revit tienen dificultades.
Un flujo de trabajo típico entre Revit y Navisworks se basa en tres elementos importantes:
- Exportaciones regulares de modelos en hitos predeterminados del proyecto.
- Sesiones centralizadas de detección de colisiones en Navisworks.
- Esfuerzos de resolución específicos en el modelo Revit original.
Este ciclo es algo más complejo que con las capacidades de Revit por sí solas, pero la ganancia en eficiencia que proporciona Navisworks suele compensar esta desventaja en proyectos grandes y complejos. También hay muchas empresas que prefieren utilizar un enfoque híbrido, gestionando las tareas básicas de detección de colisiones con las propias capacidades de Revit y reservando los procesos más complejos, como las sesiones de coordinación multidisciplinar, para Navisworks, donde mejor se desenvuelve.
Guía paso a paso: análisis de detección de colisiones en Revit
Como hemos mencionado, muchos esfuerzos de coordinación avanzados requieren la integración con Navisworks y una gran cantidad de pasos específicos para cada caso que no se pueden replicar de forma razonable en un solo lugar. Al mismo tiempo, las capacidades nativas de Revit para comprobar interferencias siguen siendo más que suficientes para los escenarios de detección de colisiones más comunes. Este proceso básico de detección de colisiones se lleva a cabo paso a paso:
- Proceso de preparación
Asegúrese de que todos los modelos vinculados relevantes estén cargados y colocados correctamente.
Puede navegar a la pestaña Administrar y verificar que los vínculos entre los modelos sean visibles en todas las vistas.
Si el proyecto es lo suficientemente grande, se pueden utilizar conjuntos de trabajo para controlar las partes específicas del modelo que se van a comprobar, a fin de evitar perder tiempo comprobando áreas irrelevantes.
- Acceso a la herramienta Comprobación de interferencias
A continuación, seleccione la pestaña Colaborar en la cinta de la interfaz.
Una vez seleccionada, se recomienda localizar y desplazarse al panel «Coordinar», y a continuación hacer clic en el botón «Comprobación de interferencias».
La herramienta Comprobación de interferencias se puede iniciar en un cuadro de diálogo independiente que ayuda a los usuarios a configurar varios parámetros de detección.
También se puede acceder a la misma opción mediante la pestaña Administrar, en «Coordinación».
- Definición de los elementos que se van a comprobar
El cuadro de diálogo Comprobación de interferencias es donde se especifican los conjuntos de elementos para la comprobación: exactamente dos conjuntos de elementos que se comparan entre sí.
Debe hacer clic en el botón «Seleccionar» aquí para la primera categoría (debería aparecer como «Categorías del proyecto actual o de un archivo vinculado»).
Cuando aparezca el cuadro de diálogo de selección de varias categorías, podrá elegir los elementos que desea comprobar.
Debe repetir el mismo proceso para la segunda categoría de elementos que desea comprobar.
No se recomienda comprobar demasiadas categorías a la vez, ya que los resultados de la prueba podrían ser muy confusos.
- Configuración de las opciones de comprobación de interferencias
Antes de iniciar la comprobación, le recomendamos que revise las opciones disponibles en la parte inferior del cuadro de diálogo.
Puede elegir si desea buscar intersecciones dentro de cada conjunto seleccionado o entre los dos conjuntos específicos que haya elegido.
La mayoría de los fines de coordinación solo requieren que la comprobación se realice entre conjuntos.
También existe la alternativa de utilizar la opción «Buscar intersecciones solo en áreas visibles» para limitar el proceso de comprobación a lo que se ve actualmente en la vista activa (especialmente útil para modelos más grandes).
- Ejecución de la comprobación de interferencias
Una vez seleccionadas todas las categorías y especificadas las opciones, puede hacer clic en el botón «Ejecutar» para iniciar la comprobación.
El proceso puede tardar entre unos segundos y varios minutos, dependiendo del número de elementos seleccionados y de la complejidad general del modelo.
Durante el proceso, se mostrará una barra de progreso en la interfaz de Revit.
- Revisión del informe generado por la herramienta de interferencias
Una vez finalizado el procesamiento, Revit siempre genera un informe de interferencias que muestra todos los conflictos y problemas detectados.
El informe se muestra en formato tabular con columnas que enumeran no solo los elementos en conflicto, sino también su ubicación y categoría en el modelo.
La tabla se puede ordenar haciendo clic en los encabezados de las columnas o utilizando las opciones de filtrado para tipos específicos de conflictos.
Cada fila del informe representa un conflicto espacial distinto que debe resolverse antes de continuar.
- Navegación hacia las colisiones y resolución de las mismas
La navegación por las colisiones es relativamente fácil en estos informes. Todo lo que hay que hacer es seleccionar cualquier colisión en el informe y hacer clic en el botón «Mostrar» para que Revit amplíe la ubicación del conflicto en 3D.
También resalta los elementos en conflicto en el proceso, lo que ayuda a los usuarios a evaluar la naturaleza de cada colisión de forma cómoda.
Una vez revisada la colisión, puede realizar los ajustes necesarios para resolver cada problema, como cambiar el tamaño de los componentes, mover elementos, añadir holguras de coordinación, etc.
- Exportación y documentación de los resultados
Es posible crear un registro permanente de las colisiones detectadas utilizando el botón «Exportar» de la interfaz.
De este modo, puede generar un archivo TXT o HTML, creando una documentación detallada de un proceso específico de detección de colisiones para futuras reuniones de coordinación.
También puede servir como lista de verificación para realizar un seguimiento del progreso de la resolución en el futuro. Sin embargo, las tareas de generación de informes más complejas deben basarse en soluciones especializadas, como Navisworks.
El proceso de exportación de un informe a Navisworks es relativamente sencillo: hay un botón específico «Exportar a Navisworks» en la pestaña Colaborar que está integrado con Navisworks Manage para ofrecer capacidades de detección de colisiones más sólidas.
Una vez resueltos los conflictos, es muy recomendable volver a ejecutar el proceso de comprobación de interferencias para verificar si las soluciones a los problemas existentes han creado nuevos conflictos en el modelo. La detección eficaz de conflictos casi nunca es una tarea que se realiza una sola vez, por lo que es mejor abordar la detección de conflictos en Revit como un flujo de trabajo iterativo que debe continuarse durante toda la fase de desarrollo del diseño.
Prácticas recomendadas para los procesos de detección de conflictos en Autodesk Revit
Un enfoque estratégico de la detección de colisiones puede tener un profundo impacto positivo en la eficiencia general y en los resultados del proyecto. También hay algunas prácticas recomendadas que representan lecciones aprendidas de varios líderes del sector que han perfeccionado sus flujos de trabajo de coordinación a lo largo de los años, algunas de las cuales se presentan a continuación.
Es muy recomendable establecer protocolos claros de detección de colisiones desde el principio, asegurándose de definir qué elementos deben comprobarse entre sí y en qué hitos del proyecto. También es importante establecer umbrales de tolerancia realistas: deben ser específicos para su metodología de construcción y el tipo de proyecto. Unos umbrales de tolerancia incorrectos pueden permitir que se pasen por alto algunos problemas importantes si son demasiado laxos, y se puede perder tiempo en cuestiones sin importancia si son demasiado estrictos.
Aprovechar los conjuntos de trabajo y las opciones de diseño puede ayudar a controlar qué contenido del modelo se incluye en las ejecuciones de detección de colisiones, lo que permite comprobar las áreas en desarrollo activo en lugar de malgastar recursos revisando todo el modelo. Una matriz de colisiones clara y detallada con disciplinas definidas evitará tiempos de procesamiento innecesarios y garantizará que se evalúen todos los elementos críticos del proyecto.
Las convenciones de nomenclatura estandarizadas para todos los elementos del modelo pueden mejorar enormemente la comunicación en lo que respecta a la detección y resolución de conflictos. Aún mejor, se debe desarrollar un flujo de trabajo específico para la resolución de colisiones que establezca responsabilidades y plazos claros para garantizar que los problemas no queden sin resolver a medida que el modelo continúa su proceso de desarrollo.
Se deben celebrar reuniones de coordinación periódicas centradas en la revisión de los resultados de los procesos de detección de colisiones, en las que participen representantes de diversas disciplinas para tomar decisiones colaborativas en lo que respecta a la resolución de problemas. La documentación sistemática de cualquier esfuerzo de resolución de colisiones también crea un registro de auditoría que demuestra la diligencia debida de la empresa y ofrece información de referencia valiosa para futuros conflictos similares.
Las comprobaciones específicas y frecuentes también pueden ser útiles en algunas situaciones. Requieren mucho menos tiempo y recursos que los escaneos de todo el modelo, al tiempo que permiten detectar los problemas en una fase temprana, cuando son más fáciles de resolver. La implementación por fases puede ser muy útil en este sentido, ya que los sistemas principales se comprueban en una fase temprana y el nivel de detalle aumenta gradualmente a medida que avanza el diseño. De este modo, es mucho menos probable que los equipos se vean desbordados por colisiones menores y corran el riesgo de pasar por alto otras más importantes.
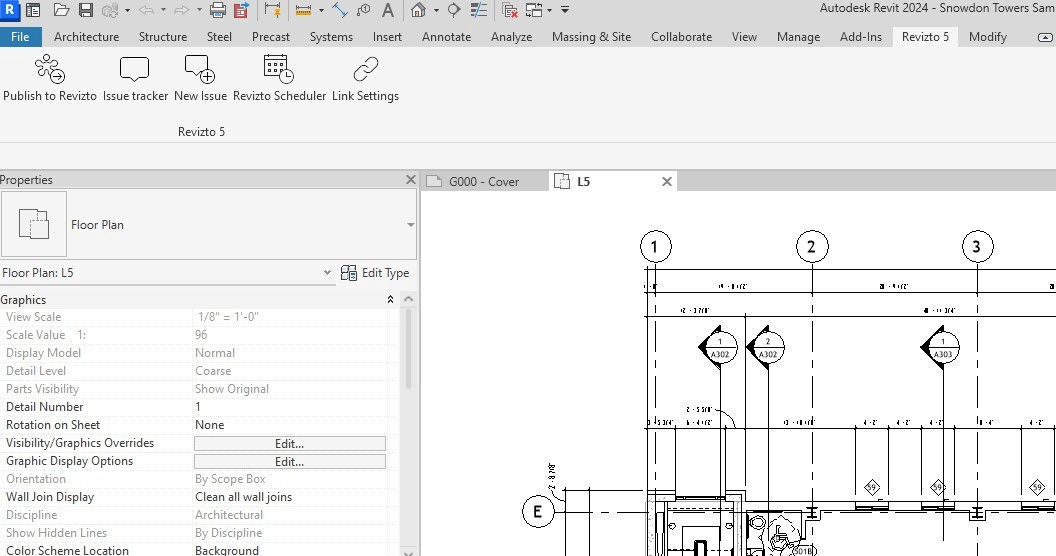
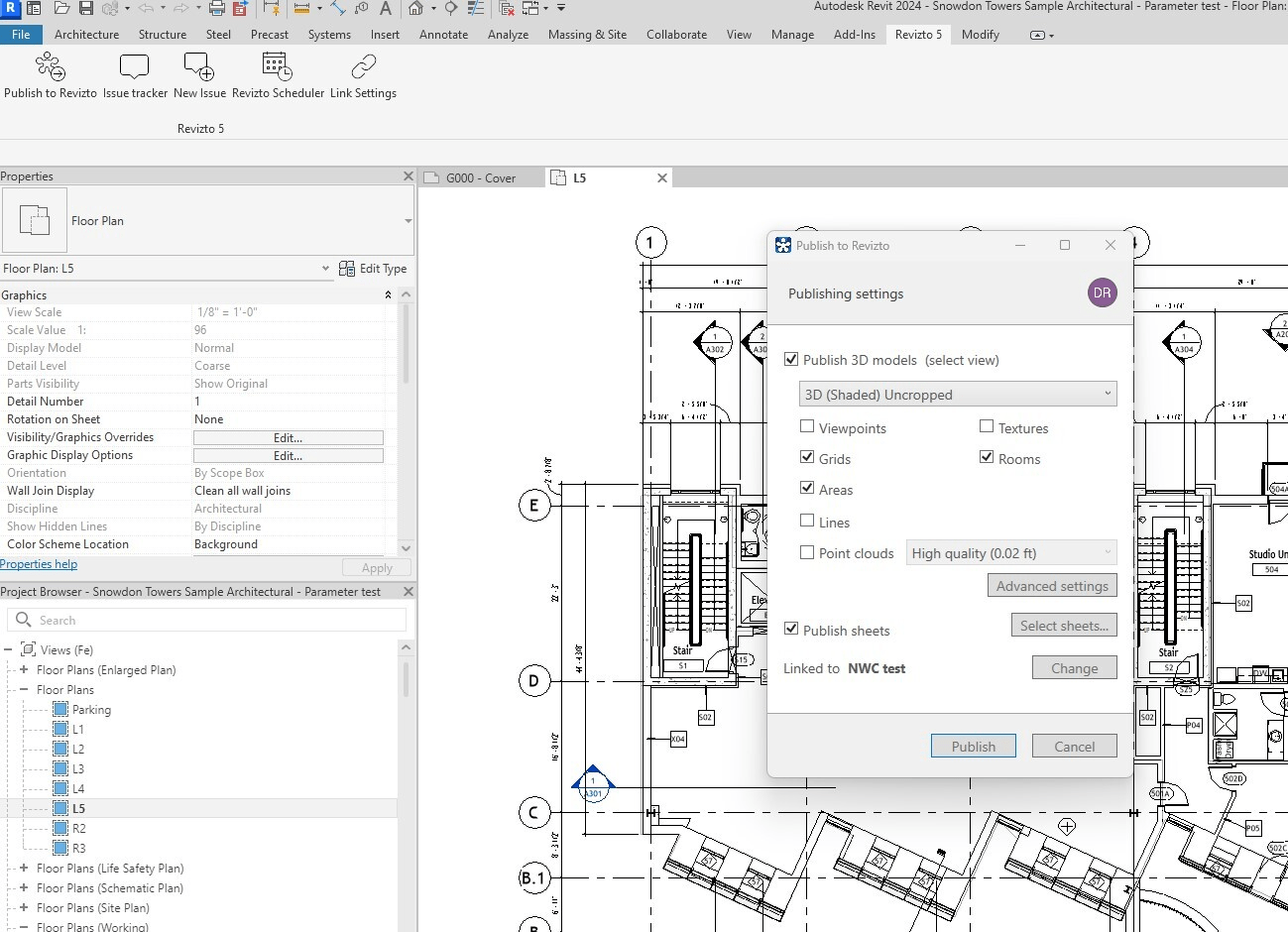
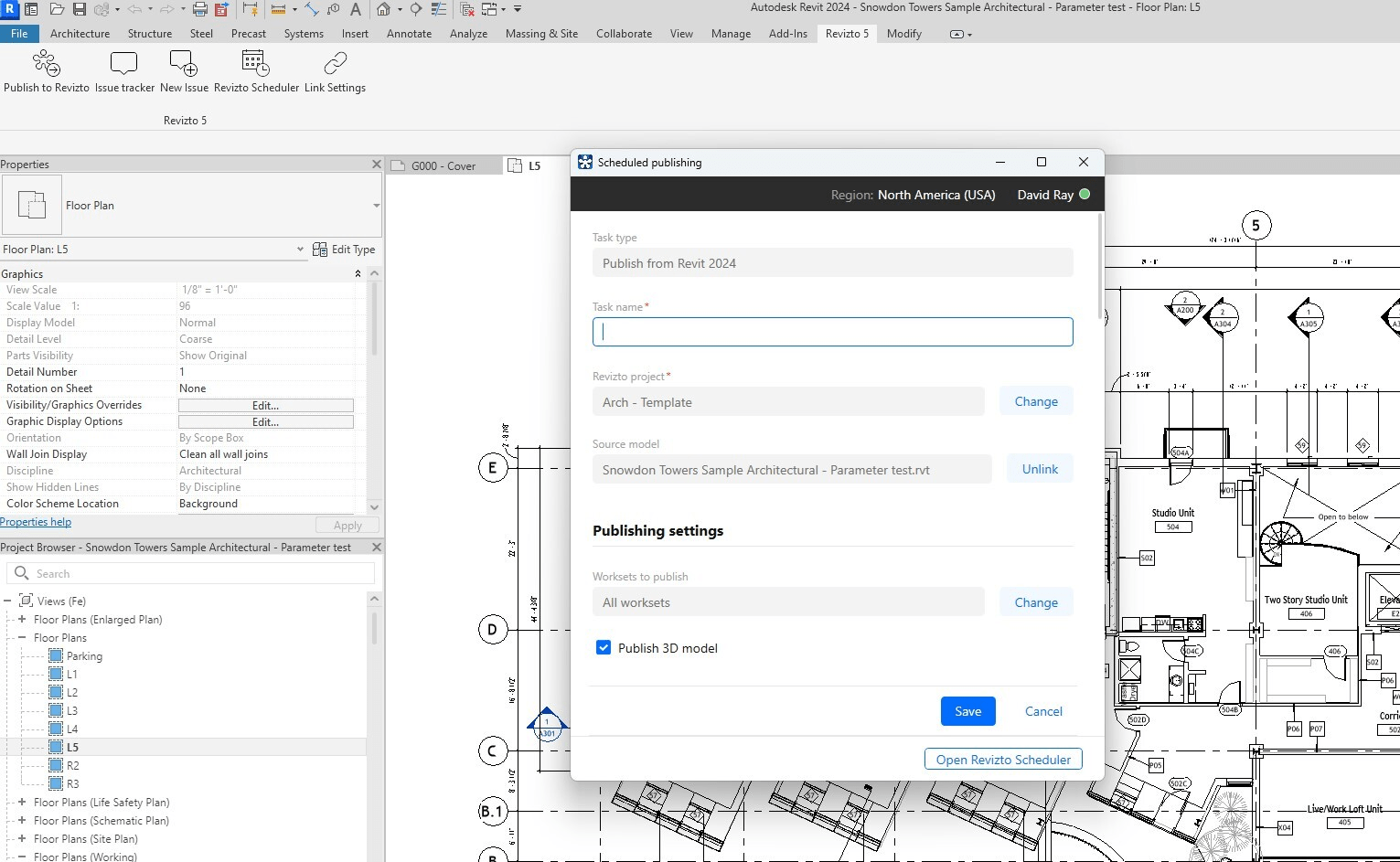
A continuación se muestra un ejemplo de cómo se puede utilizar la extensión Revizto para realizar operaciones de detección de colisiones en un modelo Revit y publicarlas en el propio programa de Revizto (de forma manual o automática).
Conclusión
La capacidad de detección de colisiones de Revit es una parte importante de los esfuerzos de coordinación BIM modernos, teniendo en cuenta la gran cuota de mercado del programa. Ofrece a los equipos de diseño la capacidad de encontrar y resolver conflictos espaciales antes de que se traduzcan en problemas sobre el terreno, que son mucho más costosos de resolver. Aunque las capacidades de detección de colisiones integradas en Revit tienen sus propias limitaciones (especialmente en proyectos más grandes y complejos), siguen siendo un excelente punto de partida para la coordinación y se integran perfectamente en el proceso de diseño.
Por otra parte, Revit también se puede complementar con herramientas especializadas como Navisworks, lo que mejora enormemente la calidad y el rendimiento de los esfuerzos de coordinación de modelos y crea una base sólida para una estrategia integral de detección de colisiones que mejora los resultados de los proyectos.
El verdadero valor de la detección de colisiones de Revit va más allá de la simple localización de interferencias. Se trata de un proceso fundamental que puede transformar todo el proceso de diseño, pasando de ser reactivo a proactivo, al tiempo que se dedica mucho más esfuerzo a la colaboración. A medida que los equipos se vuelven más competentes en la implementación de procesos de detección de colisiones en sus flujos de trabajo, la detección de colisiones evoluciona de un ejercicio técnico a una potente herramienta de comunicación capaz de mejorar los esfuerzos de coordinación interdisciplinaria en todos los ámbitos.
En un sector en el que los problemas de coordinación pueden dar lugar a enormes problemas de programación y financieros, el dominio de las capacidades de detección de colisiones de Revit es más que una habilidad opcional: es una inversión en la calidad del proyecto y en la reputación profesional de toda la empresa, que reporta importantes beneficios a lo largo de todo el ciclo de vida del edificio.
Sobre el autor

Especialista en BIM/VDC. James Ocean es el responsable de BIMspiration en Revizto y se encarga de que todo vaya viento en popa. Desde el apoyo y la enseñanza a nuestro equipo interno, así como a nuestros clientes, James nos muestra los entresijos y la mejor manera de aprovechar Revizto para maximizar los flujos de trabajo, reducir costes y conseguir que todo tipo de proyectos lleguen a la línea de meta.
Descubra todo lo que puede lograr con Revizto
Active una colaboración BIM fluida y eficiente: solicite su demo hoy mismo